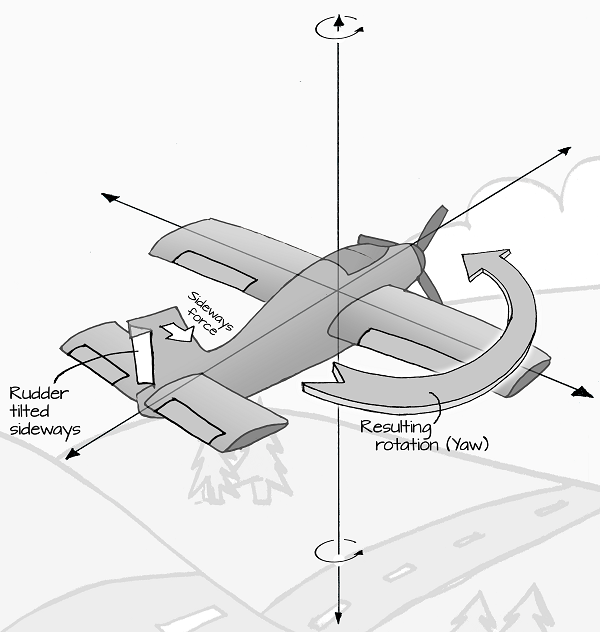
Airplanes are able to turn by using a control surface called a rudder. The rudder is used to push the tail to one side or the other, causing a rotation referred to as yaw. Yawing allows an aircraft to turn similar to how the front wheels of a car are used to make the car steer:
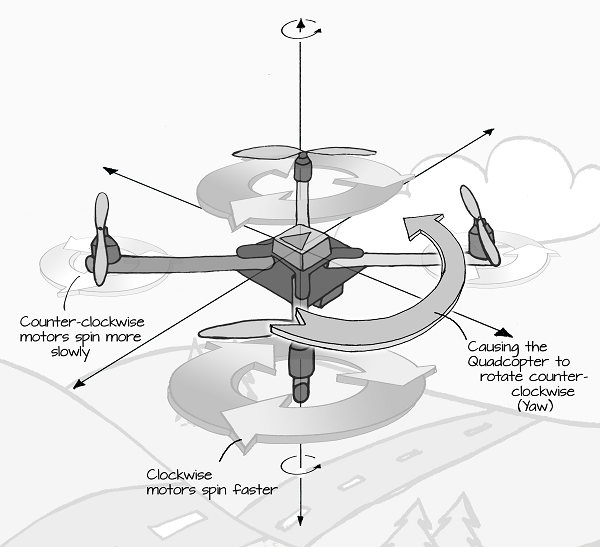
Multirotors are able to yaw by taking advantage of the angular momentum of the spinning motors and propellers. Remember that on a quadcopter, 2 of the motors spin in one direction and two of them spin in the other direction to balance out the angular momentum on a quadcopter. If you intentionally unbalance the angular momentum by speeding the two clockwise spinning motors up and slowing the two counter-clockwise spinning motors down, the body of the quadcopter begins turning counter-clockwise:
It is important to note that when a quadcopter is yawing, only two of the motors are providing most of the lift. This means that the quadcopter is less stable during a yawing maneuver and more susceptible to interference from wind or disruption from other maneuvers such as roll and pitch that might be happening at the same time.