Meet the cyber:bot board
The micro:bit attaches to the cyber:bot board, which is then mounted on the robot chassis. Your micro:bit code communicates with a Propeller multicore microcontroller on the bottom of the cyber:bot board. The Propeller controls the servo motors and interacts with sensor circuits you build on the white breadboard. For a more complete reference, see the cyber:bot board guide.
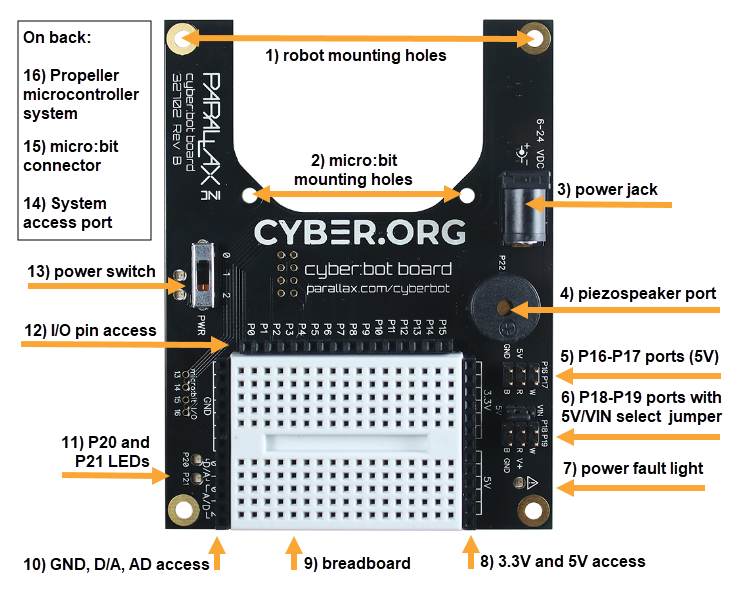
- Take a look at your cyber:bot board's features.