Basic Line Following with cyber:bot
How many possible combinations of QTI sensor states exist from pattern? The values could range from 0b0000 (0) to 0b1111 (8+4+2+1=15) for a total of 16 different number combinations!
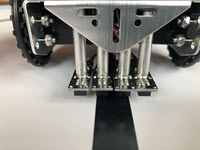
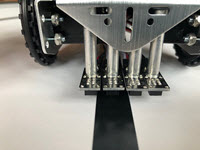
Is it likely that pattern would be 0b1001 where the two outside QTI sensors are seeing black? Not likely since they’re 1-½” apart and electrical tape is less than ¾” wide. Rather than check for every possible 16 cases, choose the ones which are most likely. This saves memory and creates a faster-running program. The example program has eight possibilities shown and described in the following 8 images.

0b1000, Sharp left turn
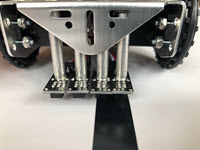
0b1100, Medium left turn
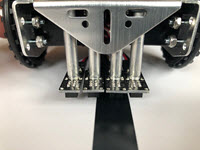
0b0100, Gentle left turn
0b0110, Straight ahead full speed
0b0010, Gentle right turn

0b0011, Medium right turn

0b0001, Sharp right turn

0b0000, Backup, turn, rotate, make a sound - or do the same command previously executed?
The cyber:bot Forward and Backward tutorial showed how the right motor must turn the opposite direction for the robot to go forward, using negative values. For example:
bot(18).servo_speed(75) # Full speed forward bot(19).servo_speed(-75)
Note that the example QTI_Follow_Line.py code uses all positive values. How is that possible? At the end of the program the wR values are made opposite, allowing the use of all positive numbers as arguments.
bot(18).servo_speed(wL)
bot(19).servo_speed(-wR)
This makes it a little bit easier to come up with drive speed values in the example program. The values work well with a gentle, curvy line formed with electrical tape. The combinations of motor speeds you use will vary based on the line you create.
ERROR FALSE ALARM! On line 19 of the script z = bit.get(pattern, x), you might see a syntax checker error warning: Argument does not match parameter type for parameter "v". This is just a false alarm. The script actually works fine, so go ahead and send it to the micro:bit.
Script: QTI_Follow_Line
- If it's not still open, use the micro:bit Python Editor to Open QTI_Display_Detections.
- Set the project's name to QTI_Follow_Line, update the script so that it matches the one below, and then click Save.
- Click Send to micro:bit.
- Set the PWR switch to 2, and test the cyber:bot on your track.
- Depending on the difficulty of the track, you might need to slow down or speed up some of the script's maneuvers. There is also plenty of room for customizations to improve the cyber:bot robot's QTI roaming performance on various tracks.
- Remember to set the PWR switch to 0 when you are not running the cyber:bot. If you are done for the day, also unplug the battery pack barrel plug from the cyber:bot board's barrel jack.
# QTI_Follow_Line
from cyberbot import *
from qti import *
from intbits import *
wL = 0
wR = 0
bot(22).tone(500, 1000)
while True:
# Read QTI sensors
pattern = qti(7, 4).read()
# Display QTI sensors
for x in range(0,4):
z = bit.get(pattern, x)
for y in range (0,5):
display.set_pixel(x, y, z*9)
# Calculate speeds to respond to detection patterns
if pattern == 0b1000:
wL = 10
wR = 100
elif pattern == 0b1100:
wL = 30
wR = 100
elif pattern == 0b0100:
wL = 60
wR = 100
elif pattern == 0b0110:
wL = 100
wR = 100
elif pattern == 0b0010:
wL = 100
wR = 60
elif pattern == 0b0011:
wL = 100
wR = 30
elif pattern == 0b0001:
wL = 100
wR = 10
elif pattern == 0b0000:
bot(22).tone(500, 20)
# Update wheel speeds
bot(18).servo_speed(wL)
bot(19).servo_speed(-wR)
High-speed Line Following with cyber:bot
If you are competing in a line following contest, you can speed up your cyber:bot two different ways.
- First, consider moving the power jumper from Vdd to Vin.
- Next, you could upgrade your cyber:bot with the Parallax Feedback 360° High Speed Servos.