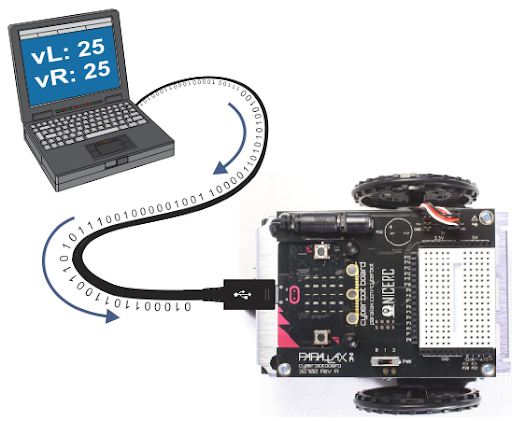
Most radio applications started as working prototypes connected by wires. At some point in the development process, the wires get replaced by a radio link. When it comes to robots, we refer to that as tethered control. When a radio link replaces the wires, it becomes radio controlled (RC), or sometimes wireless controlled.
One reason many devices are developed with wired connections is that it simplifies troubleshooting. The engineers doing the development do not have to worry about whether the radio is having problems if they are using wires. Once the system behaves well with the wired connection, the next step is to replace the tether with a radio link.
In this tutorial we will do the same thing: start with tethered keyboard control of the cyber:bot, then replace the tether with a radio link.