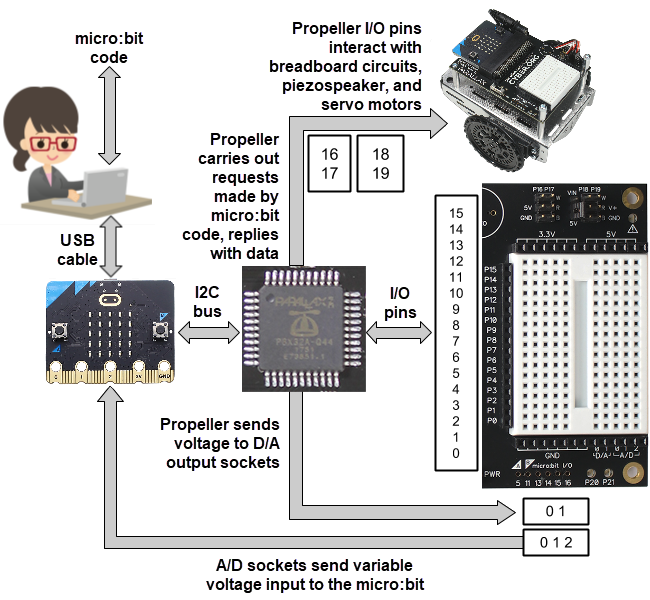
To program your cyber:bot, you will write Python scripts and flash them to the micro:bit as usual. But the micro:bit won't be working alone. The cyber:bot has two key microcontroller chips that communicate via a pair of circuit lines, one for a common clock and one for data, called an I2C bus.
- The micro:bit module's Nordic nRF51822 microcontroller executes your scripts when you flash them, and it is the "boss" of the cyber:bot system.
- The Propeller P8X32A microcontroller on the underside of the cyber:bot board is pre-programmed to be an "assistant" to the Nordic chip.
When your script uses functions from the cyberbot library module, the Nordic chip sends command codes to the Propeller, which then takes action based on the code it received. Using its digital input/output pins, labeled P0-P22, the Propeller controls the servo motors and interacts with circuits on the cyber:bot board. If you have built sensor circuits on the breadboard, the Propeller may also send data back to the Nordic chip.
- Study the diagram below for a visual overview.
Now that you have an idea of how the cyber:bot robot's parts will work together, you are ready for the next tutorial, Navigation with the cyber:bot.