Parts needed:
(1) cyber:bot board with micro:bit installed, servos and battery pack unplugged!
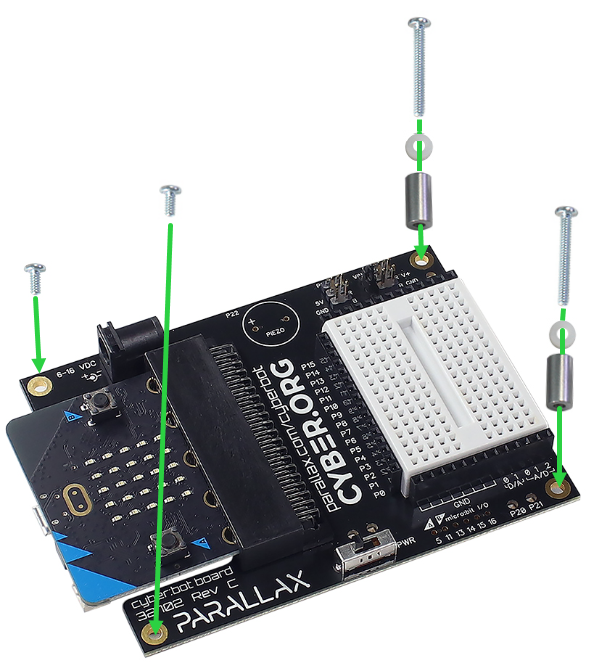
(2) 1/4-inch pan-head screws
(2) 7/8-inch pan-head screws
(2) white Nylon washers
(2) 1/2-inch round aluminum spacers
- Rest the cyber:bot board on top of the chassis' four standoffs. The white breadboard should be near the front of the cyber:bot, NOT over the tail wheel ball.
- Put a 1/4-inch screw through the each of the board's rear mounting holes, and secure to the rear standoffs.
- Slip a white Nylon washer, and then a ½” metal spacer, over each of the 7/8-inch screws, and secure to the front standoffs.
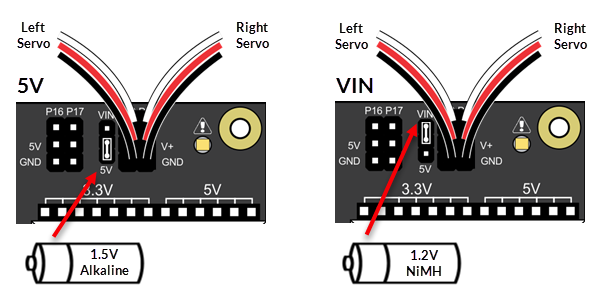
- Reconnect the servos and battery pack:
When assembled, your cyber:bot should look like this from the top:

- Make the loose wires tidy by pulling the slack back into the bottom of the robot. A zip tie could hold them tightly, or you may press them between the servos and chassis.
