Did You Know: Types of Servos
A standard servo turns to and holds a certain angle in response to a rapid series of timed on/off signals from the cyber:bot board. This is the kind of servo that controls the Gripper. The Parallax Standard Servo can turn to and hold positions in the 0° to 180° range.
A continuous rotation servo turns at certain approximate speeds in response to a rapid series of timed on/off signals from the cyber:bot board. This was the kind of servo that controlled the cyber:bot robot’s wheels before you upgraded them to Feedback 360° servos.
A feedback servo is a continuous rotation servo that can measure and report its angular position as “feedback.” The cyber:bot board uses the Feedback 360° servos’ angular position reports to adjust the speed control signals to make them maintain certain speeds and travel certain distances.
Your Turn: Handle with Care Automatically
Instead of you having to hold down the A/B buttons, the script can make the gripper gradually open and close on its own automatically after a button press-release. Simply put the statements updating the degrees variable and servo degree angle in a while loop that continues while the angle is greater than 30. A similar loop could also be written for button A that continues while degrees is less than 150.
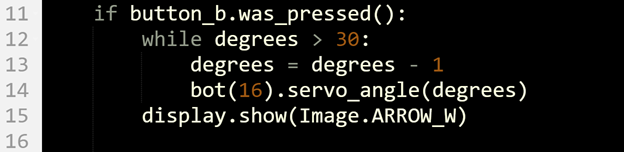
- Update the test code to make it gradually close and open the Gripper automatically by just pressing and releasing the micro:bit module’s B and A buttons.
- Name your updated script test_gripper_angles_buttons_your_turn.