If your Gripper passed the Tests section and does not need troubleshooting, continue to the next section. Otherwise, continue below.
In the Gripper 3.0 Assembly Instructions, there’s a Tuning and Programming activity with a Physically Position the Servo and Gripper section. It has instructions to “Move the servo through its range of motion and make sure it is centered when the Gripper is the closed, lowered position.” Here are some steps you can follow to make sure this was done correctly:
- Right-click center_grippper_with_fb360 and select Save link as.
center_grippper_with_fb360.hex
- In the micro:bit Python Editor editor, click Open to open the file you just downloaded.
- Click Send to micro:bit..
Script: center_gripper_with_fb360
# center_gripper_with_fb360
from cyberbot import *
display.show('C')
bot(15).servo_angle(90) # Lower only, leave closed
- Set the cyber:bot board's PWR switch to position 2.
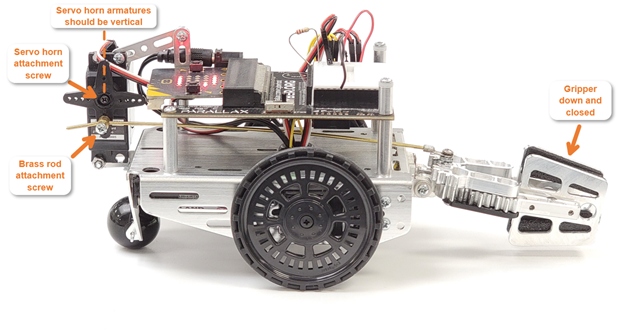
- For the mechanical connections to work properly, use the picture below as a reference to check two things:
- First, is the servo horn armature with the brass rod attachment screw pointing straight down?
- Second, is the Gripper in its lowered and closed position?
If you answered “No.” to either of the two questions, here’s how to fix it:
- Make sure the center_grippper_with_fb360 script is running, battery power connected, and the 3-position switch is set to 2.
- If the servo horn armature with the brass rod attachment screw is not pointing straight down:
- Remove the screw that holds the black 4-arm servo horn to the servo’s output spline.
- Pull the servo horn off the output spline.
- Position the horn so that the arm that’s connected to the brass rod attachment is pointing straight down. (Don’t worry about the Gripper’s open/closed up/down position at this point.)
- Press the servo horn back onto the output spline and replace the screw that holds the horn to the spline.
- If you either just finished adjusting the servo horn or if the gripper was not lowered and closed:
- Loosen the screw that holds the brass rod to the servo horn.
- Manually position the Gripper in its closed and lowered position.
- Retighten the screw that holds the brass rod to the servo horn.
- After completing this, go back to the Script and Tests sections and verify that your Gripper now properly closes and lifts, and lowers and opens.