This project allows you to use a second micro:bit to tilt control the cyber:bot robot and use its B and A buttons to remotely close and lift and lower and open.
Parts
- (1) additional micro:bit module
- (2) AAA batteries
- (1) micro:bit battery pack
- (1) programming cable
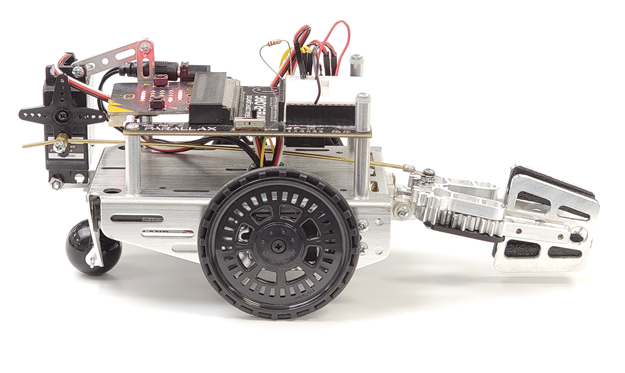
- (1) cyber:bot with a micro:bit v2 or newer, and the Gripper and Feedback 360° servos installed, tested and tuned by following these tutorials:
- Parts, Circuit, Script and Tests sections in the Test and Tune the Gripper activity.
- Script and Tests sections in the Go and Get an Object with Speed Control activity.
For those who have a class set of cyber:bot robots, a second cyber:bot with batteries can be used as a tilt controller if an extra micro:bit GO kit is not available on its own.
Circuit
- Connect the micro:bit battery pack to the second micro:bit — the one that’s not in the cyber:bot board.
- Open the battery pack, add the batteries, and put the lid back on.
- If you are instead using a second cyber:bot as the tilt controller, make sure its batteries are fresh/charged, the battery pack is plugged into the board, and the board's PWR switch is in Position 1.