Try This: Add Automation
Again, let's add a a button A feature to make the cyber:bot take the object and place it where it started before you pressed button B.
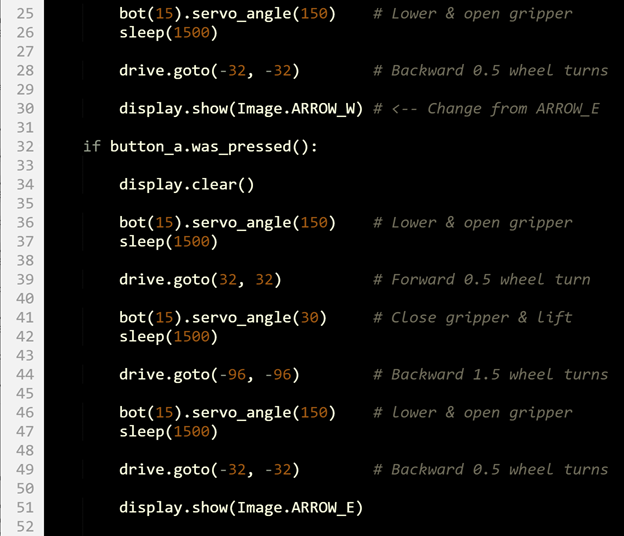
- Make the one change and add all the lines as shown in the image below.
- Set the project name to cyber_bot_gripper_forward_backward_object, and then click Save.
- Click Send to micro:bit.
- Unplug USB, and set the cyber:bot board's PWR to 2.
- Verify that the B button will make the cyber:bot bring an object forward and the A button will bring it back to the starting point.
Your Turn: Add Turns
Just as your cyber:bot could make turns with speed control, it can also make turns with distance control. With some modifications to the script, you can add any of the turns introduced in the Upgrade Your cyber:bot with Feedback 360 Servo chapter’s Maneuvers with Distance Control activity.
- Try writing a script where the cyber:bot:
- rolls forward,
- picks up an object,
- turns in place by 180°,
- then rolls forward again to set the object down near where it started.