Now, it’s time to reconnect your transmitter micro:bit and start radio-broadcasting navigation commands for your cyber:bot.
- Reconnect your micro:bit to USB.
- Click the three dots ⋮ by the Send to micro:bit button, then select Connect. Then, set up the connection to the transmitter micro:bit.
- Click Show serial.
- If you do not see a user prompt, press and release the micro:bit’s reset button.
- If you still do not see the prompt, click Open, select terminal_bot_controller_wireless. and click Send to micro:bit. Then, click Show serial again.
Next, repeat the tests you typed into the app when it was tethered:
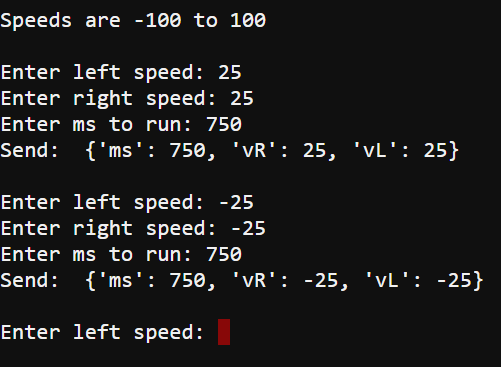
- Type 25 in response to the Enter right speed: prompt, then press Enter.
- Type 25 in response to the Enter left speed: prompt, then press Enter.
- Type 750 in response to the Enter ms to run: prompt, and press Enter.
- Verify that your cyber:bot rolled forward for about ¾ of a second.
If you take a look at the dictionary that was displayed, it should contain {'ms': 750, 'vR': 25, 'vL': 25}. Remember from the Dictionary Primer, order does not matter for dictionaries because they keep the correct values paired with the correct keys.
- Next, try -25, -25, and 750. Did it roll backwards?
- Now, try 25, -25, 750. Did it pivot to the right?
- Try 25, 10, 750 for a curving motion.
- Can you make it turn in place left and right?