Try This: Update Button A
Let's add a button A feature to make the cyber:bot take an object and place it back where it started before you pressed button B.
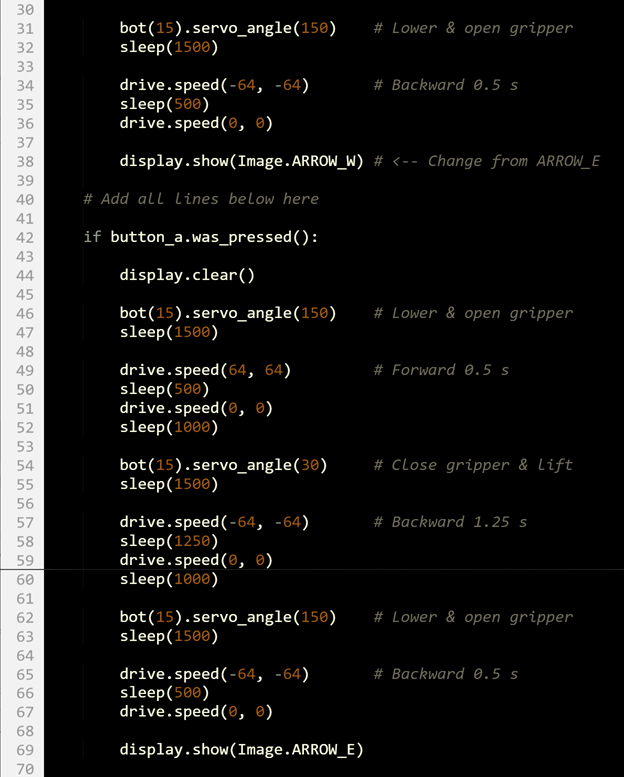
- Make the one change and add all the lines as shown below.
- Set the project name to cyber_bot_gripper_forward_backward_object, and then click Save.
- Click Send to micro:bit.
- Unplug USB, and set PWR to 2.
- Verify that the B button will make the cyber:bot bring an object forward and the A button will bring it back to the starting point.
Your Turn
Your Gripper-equipped cyber:bot with Feedback 360° servos is by no means limited to forward and backward. With some modifications to the script, you can add any of the turns introduced in the Upgrade Your cyber:bot with Feedback 360 Servos project’s Maneuvers with Speed Control and More Turning Maneuvers activities.
- Try writing a script where:
- the cyber:bot rolls forward,
- picks up an object,
- turns in place by 180°,
- then rolls forward again to set the object down near where it started.