The three main goals of this activity are to:
- Test and troubleshoot your Gripper hardware
- If needed, adjust your Gripper
- Get familiar with scripting to make the Gripper pick up and set down objects
Parts
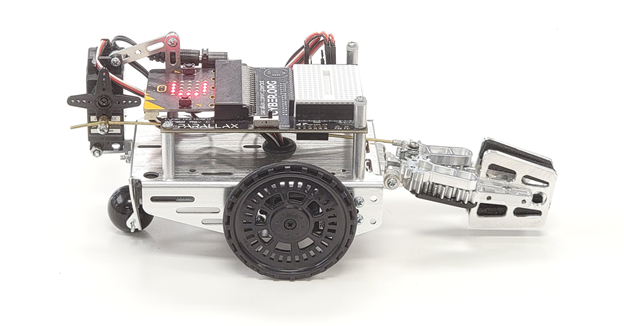
(1) cyber:bot robot with Gripper installed following the instructions in these chapters:
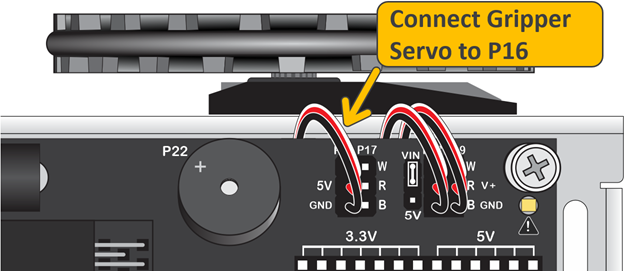
Circuit
- Connect the Gripper servo to the cyber:bot board’s P16 servo port.
- Make sure the white wire is closest to the P16 label.