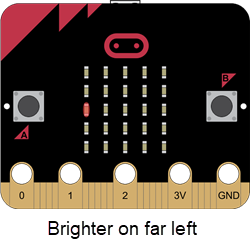
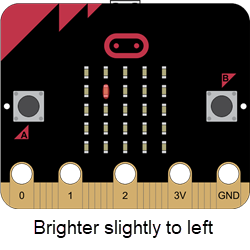
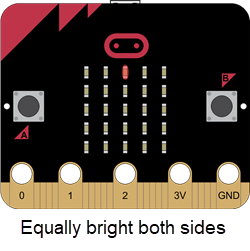
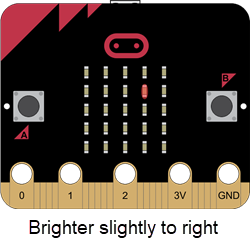
The micro:bit module’s display can be used to show which side of the cyber:bot is detecting brighter light. The following program shows a visual display of where the brigher light is hitting, reflecting the value of the norm_diff_shade variable. If the light is on the right side, the display will light up a pixel on the right side, if the light is in the middle it will light up a pixel in the middle, and so on.
ERROR FALSE ALARM! On line 11 of the script norm_diff_shade_display, you may see a compiler error warning "Operator "+" not supported for this combination of types." This is just a false alarm. The script actually works just fine, so go ahead and send it to the micro:bit.
Example script: norm_diff_shade_display
- Use the micro:bit Python Editor to open a previous cyber:bot project, like norm_diff_shade_value or cyberbot-template-with-blink.
- Set the project's name to norm_diff_shade_display, update the script so that it matches the one below, and then click Save.
- Click Send to micro:bit.
# norm_diff_shade_display
from cyberbot import *
while True:
bot(8).write_digital(1)
qt_left = bot(8).rc_time(1)
bot(6).write_digital(1)
qt_right = bot(6).rc_time(1)
norm_diff_shade = (qt_right / (qt_right + qt_left)) - 0.5
display.clear()
if norm_diff_shade > -0.5 and norm_diff_shade <= -0.35:
display.set_pixel(0, 2, 9)
elif norm_diff_shade > -0.35 and norm_diff_shade <= -0.1:
display.set_pixel(1, 1, 9)
elif norm_diff_shade > -0.1 and norm_diff_shade <= 0.1:
display.set_pixel(2, 0, 9)
elif norm_diff_shade > 0.1 and norm_diff_shade <= 0.35:
display.set_pixel(3, 1, 9)
elif norm_diff_shade > 0.35 and norm_diff_shade < 0.5:
display.set_pixel(4, 2, 9)
sleep(50)
- Set the cyber:bot board's PWR switch to 1.
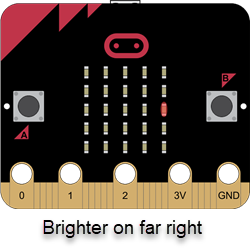
- Try casting different levels of shade over each light sensor, and watch how the pixel in the micro:bit module’s display responds. It should match the illustrations below.
- Set the cyber:bot board's PWR switch to 0.