Now, it is time to connect the servo cables to the cyber:bot board. Then, you will set the servo ports' power jumper, based on what kind of batteries you are using. But first:
- Unplug the battery pack from the cyber:bot board, if you have it plugged in!
- Put the power switch in position 0.
Connect the servos
- Plug the left servo cable onto the P18 port, and plug the right servo onto the P19 port.
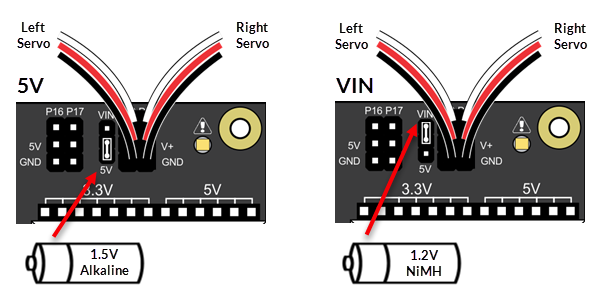
Voltage Selection Jumper
There is a smaller 3- pin header to the left of the servo ports. A shunt jumper connects two pins on it, selecting the voltage source supplied to the servos. The 5V setting limits the voltage to 5V, regardless of the input voltage. The VIN setting supplies the servo with whatever voltage level is connected to the board.
The Continuous Rotation Servos need 4 to 6 VDC to operate. So, the setting you should use depends on the kind of batteries you have.
- 1.5V alkaline batteries: Use the 5V setting. (1.5V x 5 batteries = 7.5V, which is too much.)
- 1.2V NiMH rechargeable batteries. Use the VIN setting. (1.2V x 5 batteries = 6V, which is just right)
- If needed, lift the shunt jumper off of the pins and place it back on again so it connects the center pin and the pin for the correct voltage for your type of batteries.
Add the Batteries - the last step!
- Plug the battery pack into the power jack on the cyber:bot board.
- Add the 5AA batteries to the battery pack.
Now you are ready to go to the next tutorial: Navigation with the cyber:bot.