In this activity, you will remove the cyber:bot robot’s existing continuous rotation servos and replace them with Feedback 360° servos.

Parts
(1) Fully assembled cyber:bot robot. See Build your cyber:bot (Rev C Board).
(2) Parallax Feedback 360° servos (#900-00360)
- Set aside one black plastic screw from each bag that has a Feedback 360° servo. They will be used to tighten the wheel to the servo’s drive spline.
- Don’t throw away the bag with the horn and the second screw. Although the round horn will not be used, the second plastic screw might be needed as a replacement part at some point.

(1) Parallax Screwdriver that comes with the cyber:bot (#700-00064)

(1) Plastic combination wrench that comes with the cyber:bot (#700-10025)

Remove the Original Servos
IMPORTANT: Do not throw away any of the parts you remove from the cyber:bot. You will be reattaching them later.
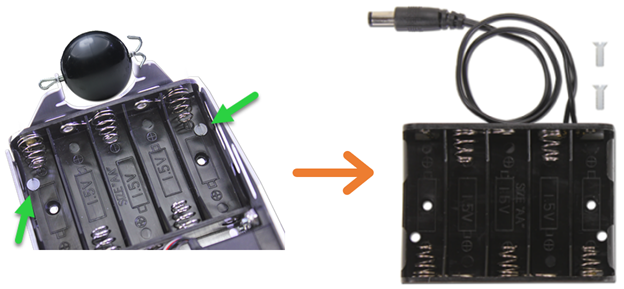
- Unplug the battery pack from the cyber:bot board and remove the batteries.
- Gently unscrew the two Nylon screws that attach the battery pack to the chassis and remove them.
- Remove the battery pack.
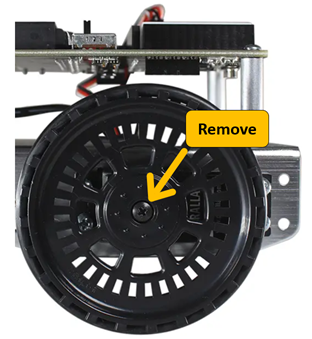
- Unscrew the screws that hold the wheels to the servos.
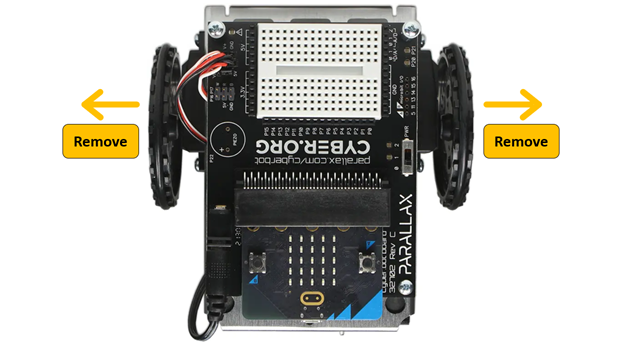
- Pull each wheel away from the servo to disconnect it from the servo output spline.
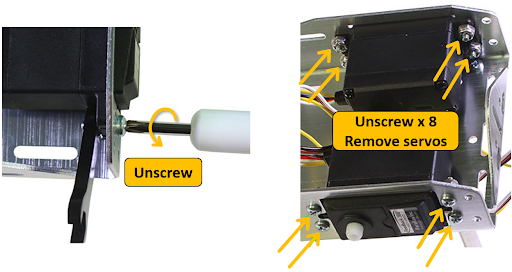
- Unscrew eight screws that attach the servos to the chassis, and remove the servos.
- Insert the black screws that held the wheels onto the CR servos into the output spline and tighten them slightly so that they won’t fall out. That way, the servos and their wheel-holding screws should be stored together.